Revolutionizing Robotic Manipulation with SimPLE Technology
In the world of robotics, the ability to accurately pick and place objects is a cornerstone of automation. A new method developed by researchers at the Massachusetts Institute of Technology (MIT) promises to enhance robotic capabilities in this area significantly. This innovative technique, known as SimPLE (Simulation to Pick Localize and placE), addresses a common challenge in robotic manipulation: transforming unstructured arrangements of objects into organized configurations.
The Challenge of Robotic Manipulation
Most robotic systems today either excel at performing specific tasks with high precision or are designed for flexibility but lack the necessary accuracy for practical applications. For example, industrial robots may perform manufacturing tasks effectively, yet struggle to adapt to new, varied tasks. Conversely, flexible robots may handle diverse objects but often do not possess the precision needed for more complex operations.
This trade-off between precision and adaptability has limited the deployment of general-purpose robots in various industries. Precise pick-and-place operations are essential for robots to handle real-world challenges effectively, as these tasks require both accurate object localization and manipulation.
Introducing SimPLE
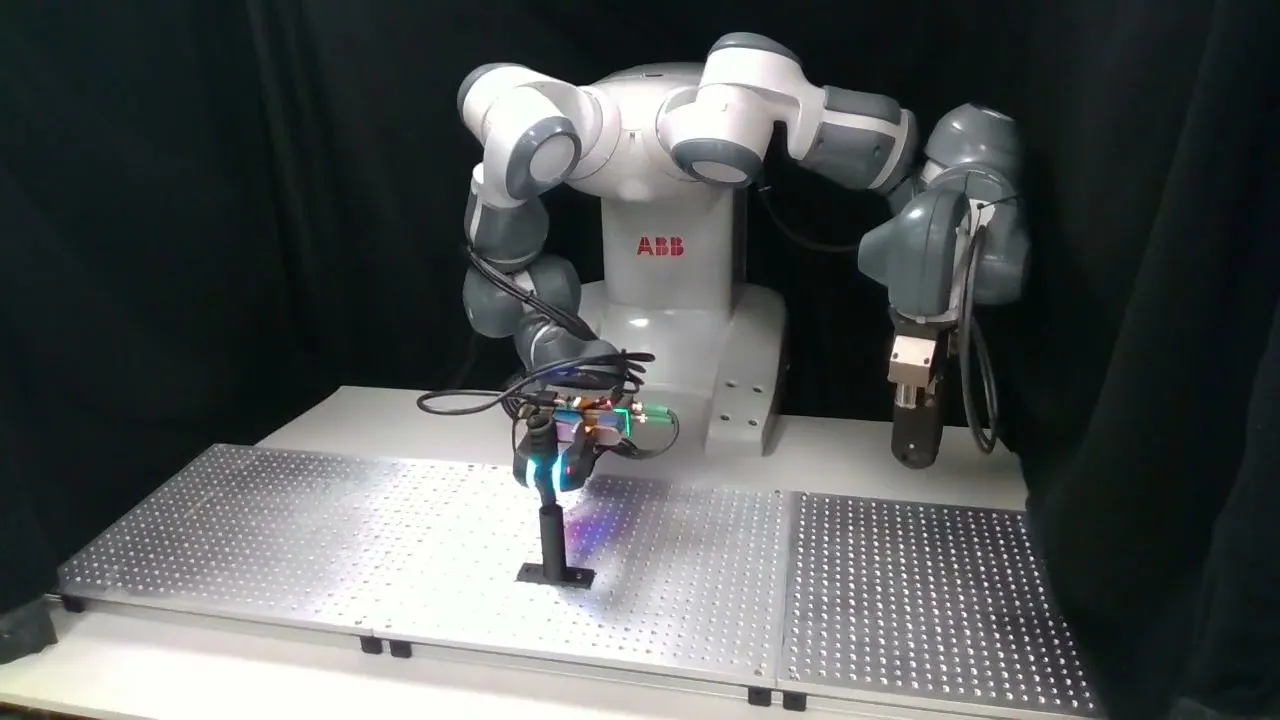
The SimPLE method utilizes a learning-based, visuo-tactile approach that allows robotic systems to pick up and place various objects with high accuracy. Unlike previous methods that rely on real-world interactions, SimPLE leverages simulation to teach robots how to manipulate objects based solely on computer-aided designs.
Maria Bauza and Antonia Bronars, the first authors of the research, emphasize the significance of this approach. They highlight that automation faces challenges in precise pick-and-place operations, which are vital for further manipulation of objects. By transforming a chaotic arrangement of items into a structured layout, robots can enhance their operational efficiency.
How SimPLE Works
SimPLE consists of three primary components developed in simulation:
- Task-Aware Grasping Module: This module identifies objects that are stable and suitable for manipulation.
- Visuo-Tactile Perception Module: This component combines visual and tactile information to accurately locate objects.
- Planning Module: This module calculates the optimal path for manipulating objects, allowing for complex maneuvers, such as handing objects between robotic arms.
Together, these modules enable robots to create effective plans for manipulating various objects while maintaining high precision. One of the most significant advantages of SimPLE is that it eliminates the need for extensive real-world training, streamlining the learning process.
Successful Implementation and Applications
The researchers tested SimPLE in a series of experiments, demonstrating its capability to successfully pick and place 15 different types of objects with varying shapes and sizes. The results showed that SimPLE outperformed existing baseline techniques in robotic manipulation.
The implications of this research are extensive. SimPLE can be integrated into industries where automation is already prevalent, such as automotive manufacturing, while also opening doors to automation in semi-structured environments like hospitals and medical laboratories. In these settings, the ability to convert disorganized sets of objects into structured arrangements can facilitate numerous downstream tasks, such as preparing equipment for laboratory testing.
For instance, in a medical lab, a robot using SimPLE could efficiently transfer testing tubes from a box to a designated rack, streamlining the workflow for subsequent testing processes.
Future Directions
As the research progresses, the team aims to expand the capabilities of SimPLE further. Two primary goals include enhancing the robot’s dexterity to tackle even more complex tasks and developing a closed-loop solution that adapts robotic actions based on real-time sensor data.
The ongoing research includes TEXterity, a project that utilizes continuous tactile information during task execution, further pushing the boundaries of robotic manipulation precision.
wrap up
SimPLE represents a significant advancement in robotic manipulation technology, combining simulation with visual and tactile feedback to enhance object handling capabilities. By addressing the challenges of precise pick-and-place tasks, this innovative approach paves the way for more adaptable and efficient robots in various industries. As research continues, we can expect further improvements in robotic dexterity and robustness, promising a future where automation can handle increasingly complex tasks with ease.